A robot (a szláv robota a.m. szolgaság, munka szóból) elektromechanikai szerkezet, amely előzetes programozás alapján képes különböző feladatok végrehajtására. Lehet közvetlen emberi irányítás alatt (mint a Space Shuttle robotkarja), de önállóan is végezheti a munkáját egy számítógép felügyeletére bízva.
 A robotokkal rendszerint olyan munkákat végeztetnek, amelyek túl veszélyesek vagy túl nehezek az ember számára (például nukleáris hulladék megsemmisítése) vagy egyszerűen túl monoton, de nagy pontossággal végrehajtandó feladat, ezért egy robot sokkal nagyobb biztonsággal képes elvégezni, mint az emberek (például a járműgyártás területén). Robotokat hadi célokra is felhasználnak. A katonai célokra készült robotok feladata általában felderítés.
A robotokkal rendszerint olyan munkákat végeztetnek, amelyek túl veszélyesek vagy túl nehezek az ember számára (például nukleáris hulladék megsemmisítése) vagy egyszerűen túl monoton, de nagy pontossággal végrehajtandó feladat, ezért egy robot sokkal nagyobb biztonsággal képes elvégezni, mint az emberek (például a járműgyártás területén). Robotokat hadi célokra is felhasználnak. A katonai célokra készült robotok feladata általában felderítés.
Ipari robotok
Az ipari robotok mára az automatizált gyártósorok mindennapos szereplőivé váltak. A hozzájuk kapcsolódó alapfokú ismeretekkel – véleményünk szerint – minden automatizálási szakembernek rendelkeznie kell. Mivel nem tudunk az Interneten elérhető, közérthető tananyagról (főleg magyarul), elhatároztuk egy cikksorozat indítását. A sorozat szándékosan cégfüggetlen, senki által nem szponzorált.
Történelem
A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. Az egyik úttörőnek a francia Vaucanson zenélő babáját nevezhetjük, mely 1700-ban készült. Jóval komolyabb szerkezet volt az “Író fiú“, egy svájci órás műve 1772-ből, mely bábu programtárcsák és pantográf karszerkezet segítségével 40 karakternyi szöveget volt képes tollal papírra vetni.
1893-ban, Amerikában már beépített gőzgép által hajtott lépegető készül, a XX. században pedig munkára fogják az automatákat. Vezérlésük eleinte mechanikus, majd elektromechanikus, később elektronikus.
A “robot” megnevezés Karel Capek cseh írótól származik, aki egy színművében a szláv robota, azaz munka szóból származtatta azon gépezetek nevét, melyek fellázadtak az emberek ellen, s átvették a hatalmat a földön. 1920-at írtak ekkor, Arnold Schwartzenegger – a Terminátor – még meg sem született…
Az első robot sorozatgyártás 1959-ben indul, és 2001-ben már a LEGO is kínál vonalkóddal tanítható, mikroprocesszor vezérlésű játékrobot építőszettet.
Főbb részek
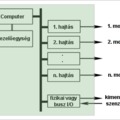
Egy ipari robot napjainkban két fő részből áll: Vezérlőszekrény (balodali kép) és a robotkar (jobboldali kép). A kettőt vaskos kábelköteg (hajtások, szenzorok) köti össze. Nem soroljuk a robotok közé azokat a berendezéseket, melyek egyetlen munkaciklus mechanikus ismételgeté- sére képesek (helyező). Ezek általában nem rendelkeznek vezérlővel, egyszerű végálláskap- csolók vezérlik a mozgásukat.
A robotok programozása vagy a vezérlőszek- rényhez csatlakoztatott PC-n futó szoftverből, vagy a robotkarnak a pályán való kézi végigvezetéséből (tanítás) áll. Ezt később részletesen kifejtjük.
A robotkar
A robotkar önmagában is igen összetett szerkezet, főbb részei: váz, mozgatók, érzékelők. A vázszerkezet két összetevője a karok (kinematikai tagok) és az őket összekötő ízületek (kinematikai kényszerek).
Szabadságfok: Az ízületek száma. Ízületből kétfajtát ismerünk: A forgó- és a csúszó ízületet. Az első típus jele R (rotáció), a másodiké T (transzláció). Ha a robot talapzatától kiindulva az ízületek sorrendjét leírjuk – pl. RRTR – a robotkar felépítését kapjuk. A fenti képen pl. egy. RRRRR robotkar látható. Keresse meg az öt forgáspontot!
A világpiacon ma a kb. 6 szabadságfok szinte minden variációja fellelhető, de a legáltalánosabb formák (az első 3 kényszer típusát tekintve) a következők: TTT, RRT és RRR. Az alábbi képeken balról-jobbra ugyanebben a sorrendben láthatóak. A szaknyelv a TTT felépítést Kartéziánusnak, az RRR felépítést SCARA-nak nevezi.
Mit mozgat?
A robotkarok végére kerül felszerelésre az az eszköz, aminek a mozgatása a feladat. Fontos alapfogalom a TCP (Tool Center Point), az a pont a készüléken, ami a “0-pont”, a mozgatás programozásakor, ellenőrzéskor és minden méretezéskor a kiindulási pont. A mozgatott (applikációs) eszköz a leggyakrabban egy megfogó-, festő- vagy hegesztőkészülék. Tipikus képviselőik az alábbi képeken láthatóak. A megfogó eszközök (és persze a robotkarok) terhelhetősége a grammoktól (SMD alkatrészek) a mázsákig (kamionváz elemek) terjed.
Ahány ízület, annyi hajtás
Ez szükségszerű összefüggés, hiszen pl. egy csuklópontot hajtás (és rögzítés) nélkül hagyva a pozícionálás lehetetlenné válik. A hajtások összehangolt vezérlésével (és/vagy szabályozásával) valósul meg a TCP adott pályán, adott sebességgel való mozgatása. A hajtások a karokat közvetlenül vagy mechanizmusokon keresztül működtetik. Lehetséges tehát egy forgó ízület hajtása lineáris munkahengerrel, vagy egy kinyúló kar mozgatása golyósorsón, fogaslécen, fogazott szíjon át.
A hajtások legjellemzőbb paraméterei a következők:
- Elmozdulás (löket) vagy elfordulás mértéke
- Húzó- ill. nyomóerő, vagy forgatónyomaték
- Sebesség, szögsebesség
- Gyorsulás, szöggyorsulás
- Beállási pontosság.
Az alkalmazott segédenergia szerint a hajtások a következők lehetnek:
Pneumatikus hajtások
Mind a mai napig működnek robotok, melyekben alkalmazzák a pneumatikus munkahengerekre ill. forgatóhengerekre épülő szervóhajtásokat. Igaz, e hengerek önmagukban pontos pozícionálásra nem képesek, de lineáris útmérővel ill. elfordulásmérővel kiegészítve olcsó, kis karbantartásigényű hajtások épültek belőlük. Munkahengereket a világon számtalan cég gyárt, szinte minden méretben, széles nyomatékskálán, kedvező áron beszerez- hetők. Mégis túlhaladott megoldásnak nevezhető, mivel a szervószabályozók már eltűnedeznek a piacról, s áruk sem alacsony…
Enkóderek: A mozgatókra építhető elmozdulásmérők (enkóderek) két nagy csoportra oszthatók: Abszolút- és inkrementális enkóderek. Az abszolút enkóderek a pillanatnyi pozíciót adják kimenetükön, az inkrementálisok csupán azt jelzik, hogy – erre vagy arra – az egység elmozdult egy osztásnyit. Az inkrementális enkóderek hátránya, hogy bekapcsoláskor nem ismert a helyzetük, ezért vissza kell őket vinni nullahelyzetbe. Az enkóderek pontossága a mikrométer töredéke lehet, amire pl. nagypontosságú CNC forgácsoláskor lehet szükség. Az enkódert minél közelebb kell felszerelni a mérni kívánt alkatrészhez, mert a közbeiktatott elemek (csapágy, áttétel, stb.) a pontosságot teljesen lerontják.
A pneumatikus robothajtások lelke a szervószabályozó, (képünkön a fekete előlapos doboz) ami az útmérő visszacsatolásával, 5/3-as útszelepeken keresztül állítja pozícióba a munkahengert. A szervószabályozó általában buszrendszerre (pl. Profibus DP) csatlakozik.
Hidraulikus hajtások
Jóval nagyobb üzemi nyomással (akár 200 bar) működnek a hidraulikus hajtások. Ezáltal nagyon nagy erők kifejtése válik lehetségessé, amit nagy teherbírású robotoknál, CNC forgácsológépeknél célszerű alkalmazni. A hidraulikus egységek működéséhez szükséges nagynyomású olajat a külön egységet képező hidraulikus tápegység (szivattyú) szolgáltatja.
További előnye a hidraulikus hajtásoknak, hogy jobban szabályozható a mozgatás sebessége, mint a pneumatikusaknál. Ebben a hidraulikus munkahengerekre épített szervószelepnek (baloldali képünk) van központi szerepe:
 A szelep 4 vezetékes bemenetén 2 db elektromág- nest találunk. Az egyikre a beállítani kívánt pozíciónak megfelelő feszültség (alapjel) kerül, a másikra az útadó által szolgáltatott pozíció (ellenőrzőjel). A szelep a két jel különbségével arányos átömlő keresztmetszeten tolja ki, vagy húzza be a munkahenger rúdját. Kis hiba tehát lassú elmozdulást, nagy hiba nagy sebességet eredményez.
A szelep 4 vezetékes bemenetén 2 db elektromág- nest találunk. Az egyikre a beállítani kívánt pozíciónak megfelelő feszültség (alapjel) kerül, a másikra az útadó által szolgáltatott pozíció (ellenőrzőjel). A szelep a két jel különbségével arányos átömlő keresztmetszeten tolja ki, vagy húzza be a munkahenger rúdját. Kis hiba tehát lassú elmozdulást, nagy hiba nagy sebességet eredményez.
E szelep következtében egy arra méretezett hidraulikus hajtás képes egy 100Hz-es szinuszjelet is kirajzolni.
Villamos hajtások
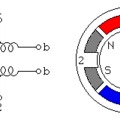
Napjaink ipari robotjaiban a villamos hajtások az uralkodóak. Bár szervórendszert sokféle motorral meg lehet valósítani, a robottechnika igényei miatt két típus terjedt el igazán: A tárcsás DC motor és a léptetőmotor. Nézzük, mik azok az igények, amik ezt eredményezték!
- Kis súly: Mivel a motorok a karokkal együtt mozognak, nem mellékes a tömegük. Kisebb súlyú motort könnyebb gyorsítani, lassítani, megtartani.
- Nagy nyomaték: Hogy a kar a teljes terheléstartományban azonos dinamikával legyen kezelhető, a nagy nyomaték fontos. A pozícionálást is könnyíti, ha van elég erő erő a motorban.
- Jó hűtés: Mivel sok indulást, fékezést kell a motornak teljesíteni, gyakran nagy az áramfelvétel. A termelődő hőt gyorsan le kell adni.
- Széles fordulatszám-tartomány: A motorok kimenetén nagyon ritkán (szinte soha nem) található állítható áttételű hajtómű, mégpedig tömegcsökkentési okból. Mivel a kar mozgatási sebessége tág határok között programozható, a motornak széles fordulatszámtartományban kell stabil nyomatékot szolgáltatnia.
A DC robotmotor
A sokféle lehetséges kialakítás közül a tárcsamotor (disc motor) a leggyakoribb az ipari robotokon. Ezeknél a forgórész egy műanyag vagy kerámia alapú tárcsa, amelyre a forgórész tekercselés (rézlemezből készül) fel van ragasztva. A rézlemez felülete nagy, így gyorsan hűl. Ennek induláskor van nagy jelentősége, hiszen az indítóáram sokkal nagyobb az üzeminél.
A disc motorok fordulatszám-szabályozását hagyományos módon, az armatúraárammal végezhetjük. A nyomaték ezeknél a motoroknál a fordulatszám növelésekor lineárisan csökken. (Konstans armatúraáramnál.)